近日,嘉職院互聯網學院、網絡空間安全學院教師吳明宇博士以第一作者身份,嘉興職業技術學院為第一署名單位,在SCI JCR一區國際權威期刊 《PeerJ Computer Science》 和 《PLOS ONE》 連續發表兩篇研究論文。
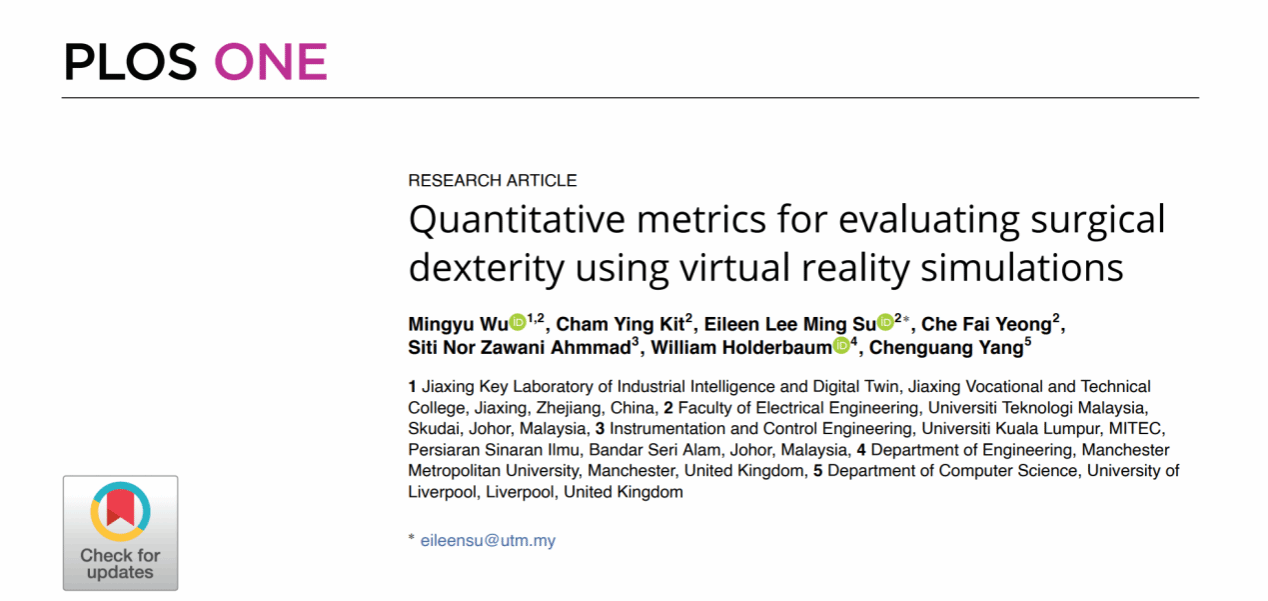
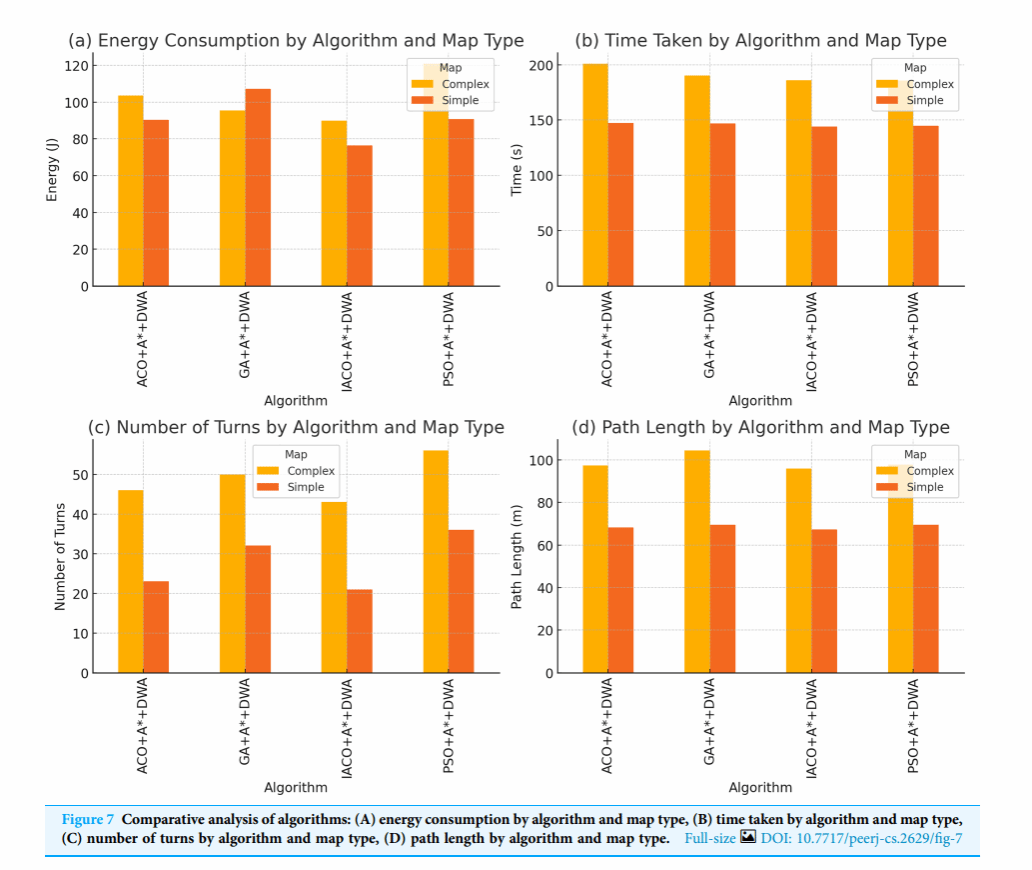
該系列學術成果在人工智能+機器人與人工智能+健康兩大領域取得了實質性突破。在機器人方向,研究提出了一種多層混合路徑規劃框架:首先利用A*算法生成全局可行解;隨后在群體智能層引入差分變異與信息素重置機制的改進蟻群優化算法,對全局路徑進行優化;最后在局部動態層結合動態窗口法(DWA),實現復雜動態環境下的實時避障與速度控制。通過在倉儲環境仿真平臺上的對比實驗,該方法在能耗降低、路徑長度縮短和任務執行時間等指標上均顯著優于傳統ACO、PSO與GWO等算法,平均能耗下降超過 12%,執行時間縮短 8%,并在多任務調度與動態避障中表現出更高的穩定性,為智能物流和倉儲機器人節能調度提供了切實可行的解決方案。
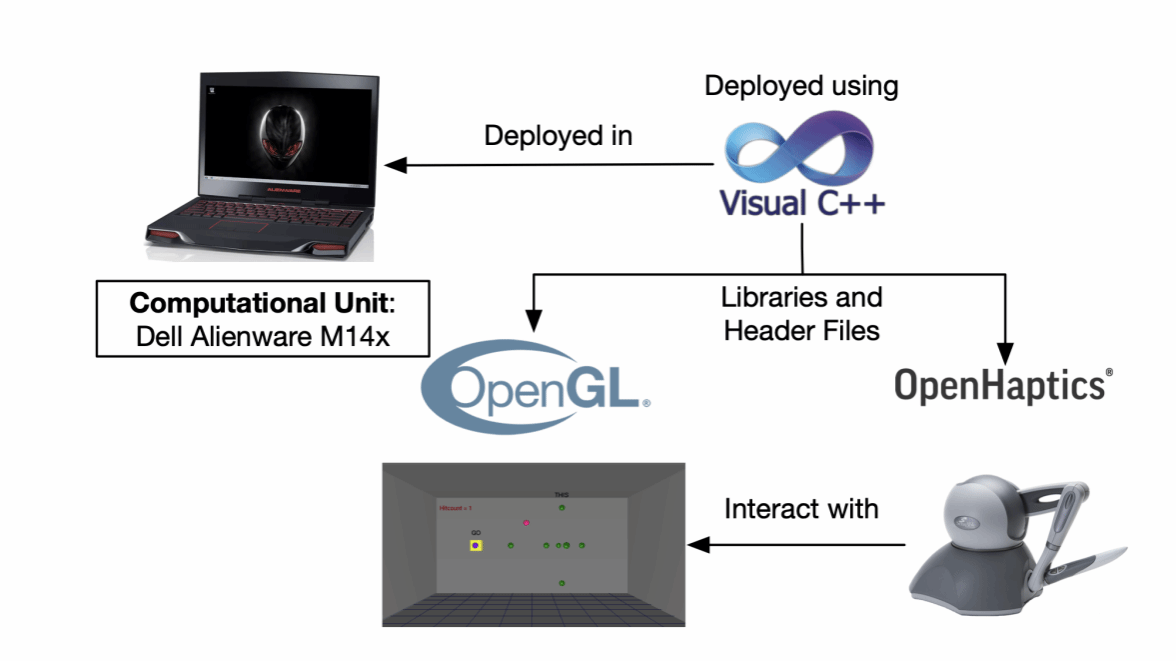
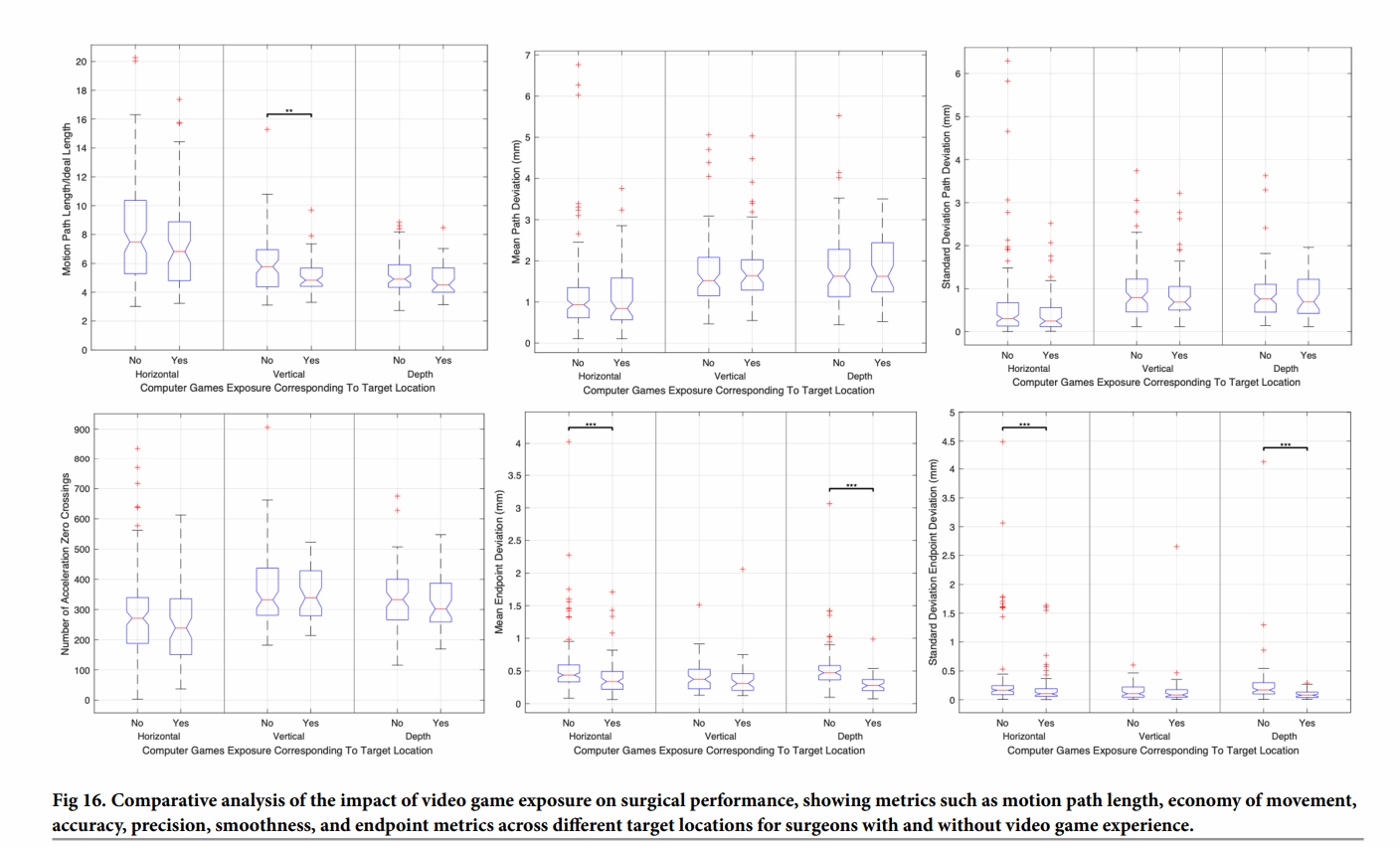
在健康醫療方向,研究基于虛擬現實(VR)手術模擬平臺,建立了一套外科手術技能量化評估體系。該體系設計了包括軌跡平滑性、操作反應時延、末端精度控制和操作冗余度在內的多維度指標,可全面刻畫手術者的靈巧度水平。實驗對比發現,使用優勢手、坐姿及10倍放大倍率能夠顯著提升操作精度和穩定性,而生活習慣變量(如咖啡攝入、睡眠時長)影響有限。研究同時揭示了不同專業背景與經驗水平的被試在技能收斂速度和操作穩定性上的顯著差異。該成果為醫學教育提供了一套可重復、可量化、跨個體對比的評價體系,為個性化外科訓練和外科教育智能化轉型奠定了重要基礎。
成果的取得,離不開學校對科研工作和青年教師培養的高度重視,下一步,吳明宇課題組將聯合境內外知名高校與科研機構,聚焦具身智能、跨模態感知與智能控制等前沿方向,開展跨國界、跨學科的協同攻關,推動人工智能在機器人、健康監測與教育創新等領域的深度融合,著力提升科研成果的質量與影響力,不斷開拓科技創新與國際合作的新局面。